Das Reconeyez-System verfügt über mehrere eingebaute Tools, um die Anzahl von Falschalarmen zu minimieren und sicherzustellen, dass alle eingehenden Alarme einen maximalen Informationswert haben. Zusätzlich zu den offensichtlichen Tools, die die Reconeyez-Cloud bietet – Schedule (Zeitplan), Disarm (Unscharfschaltung) und Tamper Sensitivity (Sabotageempfindlichkeit) –, die es dem Bediener ermöglichen, den Bewegungs- oder Sabotagesensor des Detektors einfach zu deaktivieren, wenn sich autorisierte Personen am überwachten Standort aufhalten, verfügt die Cloud über mehrere leistungsstarke automatisierte Funktionen und es gibt einige bewährte Verfahren für die Geräteinstallation, die dazu beitragen, Falschalarme zu reduzieren.
Objekterkennungsalgorithmus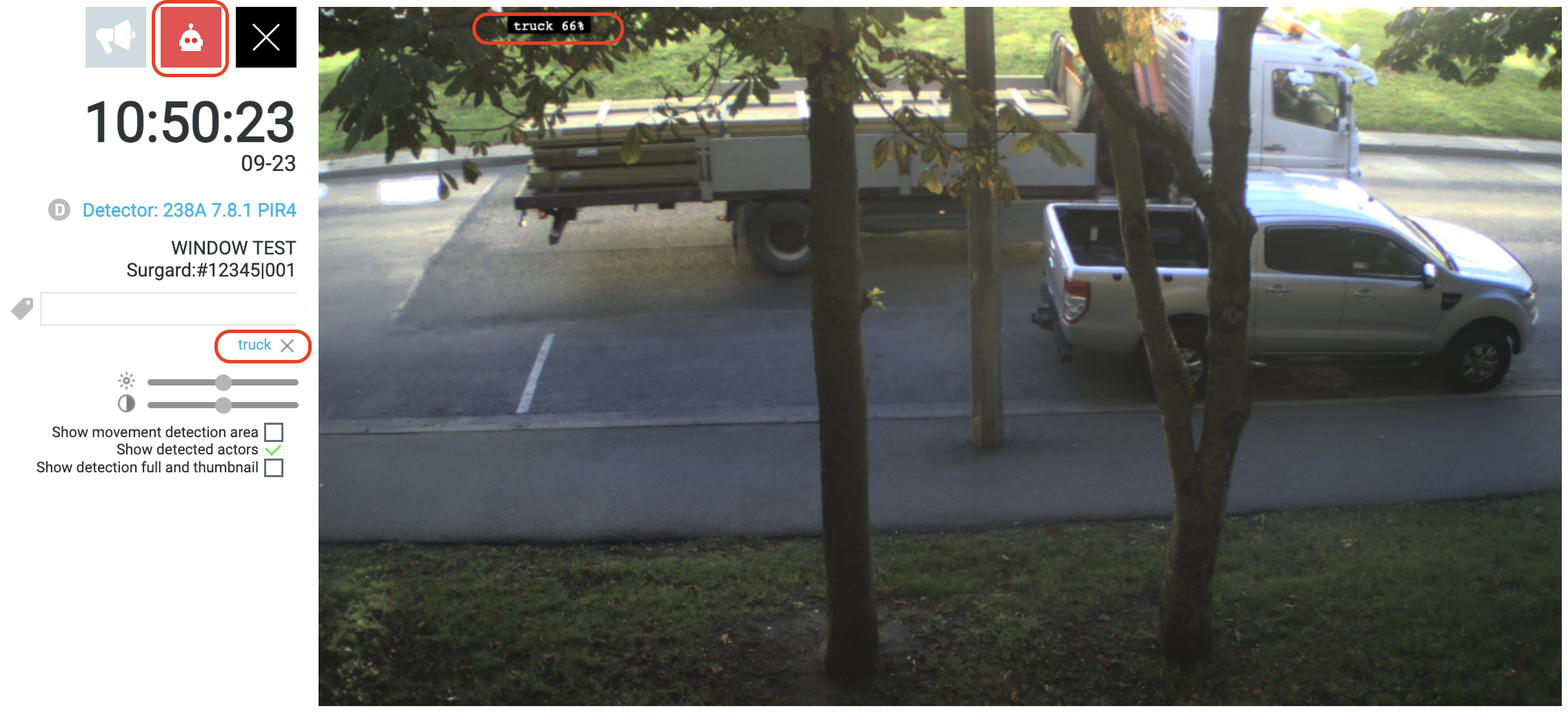
Das Reconeyez-System verfügt über einen eingebauten Algorithmus auf Serverebene zum Herausfiltern von Falschalarmen. Es handelt sich um einen Algorithmus, der Objekte auf Alarmfotos analysiert und den erkannten Objekten Bezeichnungen zuweist, z. B. Person, Auto, Lkw, zusammen mit der Erkennungswahrscheinlichkeit in Prozent. Wenn das Objekt auf dem Alarmfoto eine höhere Erkennungswahrscheinlichkeit hat als in der Geräteansicht konfiguriert, erhält der Alarm den Status Autoalarm (rotes Robotersymbol). Alarme, bei denen keine Objekte auf dem Foto erkannt wurden oder bei denen die Objekte eine geringere Erkennungswahrscheinlichkeit als in der Gerätekonfiguration angegeben haben, werden als „Autodismissed“ (automatisch abgelehnt) verworfen. Diese Funktion ermöglicht es, nur nützliche Autoalarme herauszufiltern und Falschalarme zu ignorieren. Der Benutzer kann die standardmäßigen Autoalarm-Schwellenwerte verwenden (empfohlen) oder die Schwellenwerte für jedes Objekt in der ausführlichen Device-Ansicht (Geräte) selbst konfigurieren.
Adaptive motion sensitivity (Adaptive Bewegungsempfindlichkeit)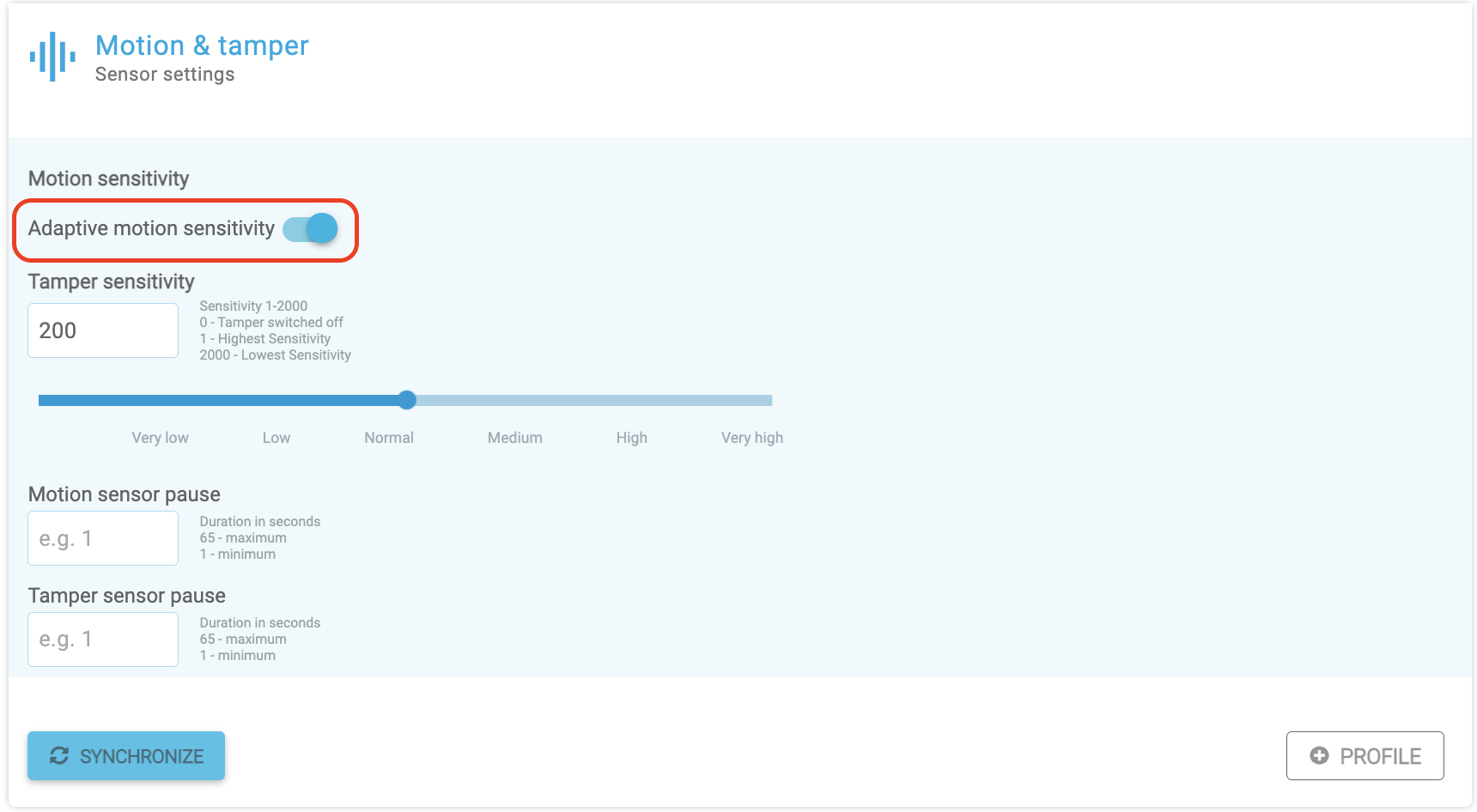
In der ausführlichen Device-Ansicht (Geräte) der Reconeyez-Cloud können Sie die Empfindlichkeit der Bewegungs- und Sabotagesensoren sowie Pausen konfigurieren, um die Anzahl der Falschalarme zu optimieren. Der Bewegungssensor verfügt standardmäßig über die automatische Funktion Adaptive Motion Sensitivity (Adaptive Bewegungsempfindlichkeit), die unbedingt aktiviert bleiben sollte. Dieser Algorithmus misst die Anzahl der Autodismissed-Alarme (automatisch verworfenen Alarme) und reduziert automatisch die Empfindlichkeit des Bewegungssensors, wenn deren Anzahl ansteigt. Sobald die Anzahl der Autodismissed-Alarme wieder sinkt, stellt der Algorithmus die Empfindlichkeit des Bewegungssensors wieder auf hoch. Auf diese Weise muss der Benutzer den Bewegungssensor nicht manuell konfigurieren, und er verfügt über eine optimale Empfindlichkeit – z. B. reduzierte Empfindlichkeit bei Sturm und standardmäßig maximale Empfindlichkeit bei Windstille.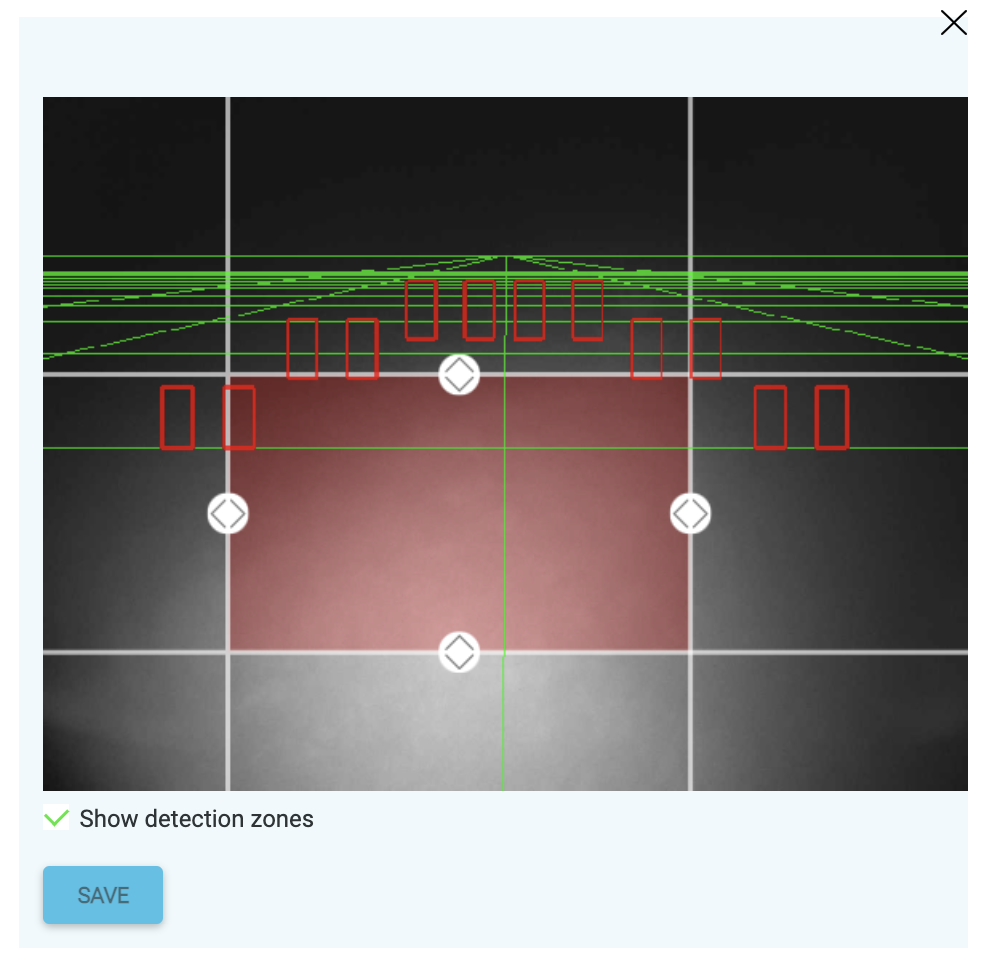
Definieren des Alarmbereichs auf Fotos
In der ausführlichen Device-Ansicht (Geräte) können Sie auch den Alarmbereich auf dem Alarmfoto definieren. Diese Funktion ermöglicht es, mithilfe eines roten Kästchens zu markieren, von welchem Teil des Fotos der Benutzer Alarme erhalten möchte. Alarme, bei denen sich das erkannte Objekt außerhalb dieses roten Kastens befindet, werden unabhängig von der Erkennungswahrscheinlichkeit des Objekts als Autodismissed-Ereignisse ignoriert. Mit dieser Funktion können Teile des Sichtbereichs des Detektors ausgeblendet werden, z. B. eine Straße mit starkem Verkehr, ein sich im Hintergrund bewegender Baum usw.
Gute Installationspraktiken zur Vermeidung von Falschalarmen
- Prüfen Sie den blinden Bereich direkt unter dem Detektor auf sich bewegende Objekte, die auf dem Alarmfoto nicht sichtbar sind (z. B. Plastiktüte, Zipperschlauch, Baumzweig usw.),
- Stellen Sie sicher, dass der 30-Meter-Bereich des Bewegungssensors keine Bereiche mit ständiger Bewegung abdeckt, z. B. eine belebte Straße im Hintergrund.
- Prüfen Sie, ob im Inneren des Detektors Feuchtigkeit vorhanden ist – ein Kurzschluss des Bewegungssensors aufgrund von Feuchtigkeit im Inneren des Gehäuses führt normalerweise zu ununterbrochenen Bewegungsalarmen bei nassem Wetter. Der Installateur kann dies verhindern, indem er sicherstellt, dass die Akkus richtig befestigt sind und beide Gummidichtungen vorhanden sind, und indem er die Geräte während der Installation auf physische Schäden überprüft.
- Prüfen Sie, ob Falschalarme nur bei windigem Wetter auftreten – dies deutet auf externe Bewegungen in der Umgebung als Ursache hin. Prüfen Sie, ob es sich bei den empfangenen Alarmen um Sabotage- oder Bewegungsalarme handelt – dies zeigt an, ob sich der Detektor selbst bewegt oder ob sich etwas vor dem Detektor bewegt.
- Bei der Überwachung eines Bereichs mit reger Bewegungsaktivität können Sie mit dem Parameter Motion Sensor Pause (Bewegungssensorpause) eine Pause nach jedem Alarmauslöser in Sekunden konfigurieren. Dies ermöglicht die Begrenzung der maximalen Anzahl von Alarmen pro Minute in Bereichen mit viel Bewegung.
- Prüfen Sie, ob bei der Installation alle hohen Pflanzen, die sich im Wind bewegen können, vor dem Detektor abgeschnitten sind. Je näher das potenziell bewegliche Objekt ist, desto wahrscheinlicher ist es, dass es bei Wind einen Bewegungsalarm auslöst.
- Verwenden Sie den Korridorlinsendetektor, wenn Sie einen schmalen Bereich neben einer verkehrsreichen Straße überwachen.
- Vergleichen Sie aufeinanderfolgende Alarmbilder, um zu sehen, was den Bewegungssensor auslöst – unbewegte Bilder zeigen nicht die Quelle der Bewegung an.